We have assessed the quality of three dimensional forest models produced from drone surveys, and conclude that concerns about their quality for canopy height and carbon measurement are unjustified.
The rise of drones has been explosive. Rapid advances in technology and decreases in price have resulted in products that can be used off-the-shelf to survey forests. Drones take overlapping photos that can be analysed using a piece of software, called structure from motion, that finds the distinctive ‘features’ shared between overlapping images. The location of these so called ‘tie-points’ is then triangulated to build a three-dimensional model of the forest.
This is extremely useful to foresters who want to know how tall their trees are and how much timber or biomass they contain. Until now they have had to choose between traditional field sampling and expensive airborne laser scanning (LiDAR) from piloted aircraft (£10,000 per day) but consumer drones fill a niche somewhere in between, enabling small areas to be surveyed at very little cost (drones can now be bought for less than £1,000). But the quality of the forest models produced by structure from motion has been questioned. The main problem is that the forest floor is generally underexposed in aerial photos, and this means that tree heights could be wrong.
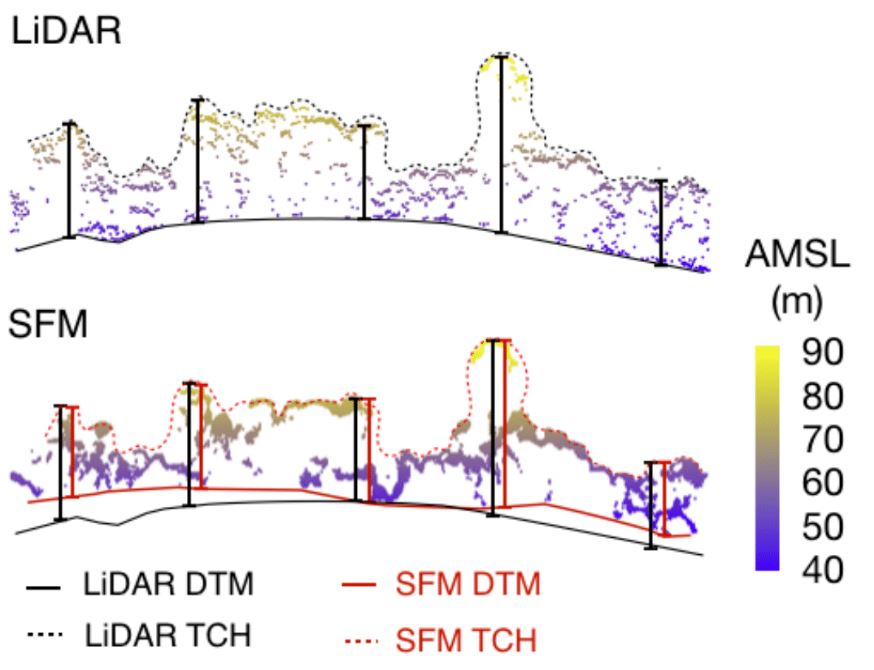
We assessed the quality of these models by mapping logged forest in Indonesia that had already been surveyed by LiDAR and then compared the two approaches. We found a very close relationship between the two sets of tree heights, with 80% of the variation in the LiDAR measurements explained by those from structure from motion but tree heights measured from structure from motion were about 5.5 m shorter than they actually were. This was actually a positive result though because the bias was very consistent making it easy to correct.
We developed a statistical correction that could be applied to our structure from motion forest models and trialled it through comparison to LiDAR at different location surveyed with a different drone. We found that the bias had been removed completely and we were still able to explain 70% of the variation in the LiDAR measurements. The correction also produced accurate biomass measurements. This is game-changing for foresters and restoration managers because it greatly increases the confidence we have in forest surveys made using structure from motion.
Two issues remain that should be understood before running out to buy a drone.
The first is that the greatest uncertainty occurs for short forest thickets, which can be very dense and have flat canopies with very little structural complexity. This makes it difficult to assess forest heights at the early stages of recovery and may reduce the value of our approach in young regenerating forests. However, it should be possible to differentiate between these vegetation types using techniques that can identify patterns and colours in leaves and branches. In fact, our PhD student, Jon Williams, is working on exactly this question.
The second issue is that consumer grade drone positioning systems (GPS) are accurate to about 3 m, but these errors accumulate during the triangulation phase of structure from motion, causing bigger errors in forest models. This problem is usually corrected by installing highly visible objects in the survey area and measuring their positions with high accuracy differential GPS (these are called ‘ground control points’) but this is not really an option under closed canopy forest. So we measured the error in models with and without ground control points, and found that although ground control points are necessary to achieve accuracy at small-scales (0.25 ha), they are not necessary when averaging across several hectares.
